Pada umur lebih dari 15 hari, ayam boiler membutuhkan lingkungan yang aman dan nyaman untuk mendukung pertumbuhan dan kesehatannya. Oleh karena itu, dirancanglah sebuah rangkaian proteus kandang ayam close house yang bertujuan untuk memberikan kondisi optimal bagi ayam boiler pada fase pertumbuhan ini.
Rangkaian kandang ayam close house pada simulasi Proteus ini didesain untuk memberikan kontrol yang baik terhadap lingkungan di sekitar ayam. Faktor-faktor seperti suhu, kelembaban, serta pencahayaan diatur secara otomatis untuk menciptakan kondisi yang mendukung pertumbuhan dan kesejahteraan ayam boiler. Sistem ini juga dilengkapi dengan sensor-sensor yang dapat mendeteksi kondisi lingkungan, sehingga dapat memberikan respons secara cepat terhadap perubahan-perubahan yang terjadi.
Melalui simulasi Proteus, kita dapat mengamati bagaimana sistem ini bekerja dalam menciptakan lingkungan yang sesuai dengan kebutuhan ayam boiler. Sebagai contoh, sensor suhu dan kelembaban dapat mengatur kondisi lingkungan secara otomatis, dan pencahayaan dapat disesuaikan sesuai dengan siklus waktu harian yang optimal bagi pertumbuhan ayam. Rangkaian ini juga dilengkapi dengan sistem pengaturan ventilasi yang dapat memastikan sirkulasi udara yang baik di dalam kandang.
Dengan adanya rangkaian kandang ayam close house ini, diharapkan dapat meningkatkan efisiensi dalam pemeliharaan ayam boiler pada fase pertumbuhan lebih dari 15 hari. Dengan lingkungan yang terkontrol dengan baik, diharapkan pertumbuhan dan kesehatan ayam dapat dioptimalkan, sehingga dapat meningkatkan hasil produksi dan kesejahteraan ayam secara keseluruhan.
- Merangkai dan menguji aplikasi output pada mikrokontroller Arduino
- Merangkai dan menguji input pada mikrokontroller Arduino
- Merangkai dan menguji I/O pada mikrokontroller Arduino















7. Potensiometer

- Type: Rotary a.k.a Radio POT
- Available in different resistance values like 500Ω, 1K, 2K, 5K, 10K, 22K, 47K, 50K, 100K, 220K, 470K, 500K, 1 M.
- Power Rating: 0.3W
- Maximum Input Voltage: 200Vdc
- Rotational Life: 2000K cycles








Untuk Modul Sensor Kualitas Udara MQ135:
Modul sensor kualitas udara MQ135 ditunjukkan di bawah ini.
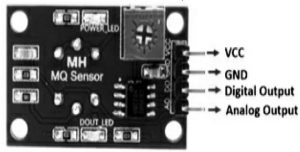
Pin 1: VCC: Pin ini mengacu pada catu daya positif 5V yang memberi daya pada modul sensor MQ135.
Pin 2: GND (Ground): Ini adalah pin potensial referensi, yang menghubungkan modul sensor MQ135 ke ground.
Pin 3: Digital Out (Do): Pin ini mengacu pada pin keluaran digital yang memberikan keluaran digital dengan mengatur nilai ambang batas dengan bantuan potensiometer. Pin ini digunakan untuk mendeteksi dan mengukur gas tertentu dan membuat sensor MQ135 bekerja tanpa mikrokontroler.
Pin 4: Analog Out (Ao): Pin ini menghasilkan sinyal keluaran analog 0V hingga 5V dan bergantung pada intensitas gas. Sinyal keluaran analog ini sebanding dengan konsentrasi uap gas yang diukur oleh modul sensor MQ135. Pin ini digunakan untuk mengukur gas dalam PPM. Ini digerakkan oleh logika TTL, beroperasi dengan 5V, dan sebagian besar dihubungkan dengan mikrokontroler.
Untuk Sensor Kualitas Udara MQ135:
Sensor kualitas udara MQ135 ditunjukkan di bawah ini.
Pin H: Ada 2 pin H, yang satu dihubungkan ke suplai tegangan dan yang lainnya dihubungkan ke ground.
Pin A: Di sini pin A dan pin B dapat dipertukarkan. Ini terhubung ke suplai tegangan.
Pin B: Di sini pin A dan pin B dapat dipertukarkan. Satu pin digunakan untuk menghasilkan output sedangkan pin lainnya dihubungkan ke ground.
Spesifikasi dan Fitur:
Spesifikasi dan fitur sensor kualitas udara MQ135 tercantum di bawah ini.
- Ini memiliki cakupan deteksi yang luas.
- Sensitivitas tinggi dan respons lebih cepat.
- Umur panjang dan stabilitas.
- Tegangan operasi: +5V.
- Mengukur dan mendeteksi NH3, alkohol, NOx, Benzena, CO2, asap, dll.
- Rentang tegangan keluaran analog: 0V-5V.
- Rentang tegangan keluaran digital: 0V-5V (logika TTL).
- Durasi pemanasan awal: 20 detik.
- Digunakan sebagai sensor analog atau digital.
- Potensiometer digunakan untuk memvariasikan sensitivitas pin digital.
- Tegangan Pemanasan: 5V±0,1.
- Resistansi beban dapat disesuaikan.
- Ketahanan pemanas: 33ohm±5%.
- Konsumsi pemanasan:<800mW.
- Suhu pengoperasian: -10°C hingga -45°C.
- Suhu penyimpanan: -20°C hingga -70°C.
- Kelembapan terkait: <95%Rh.
- Konsentrasi oksigen: 21% (mempengaruhi sensitivitas).
- Resistensi penginderaan: 30kiloohms hingga 200kiloohms.
- Tingkat kemiringan konsentrasi: ≤0,65.
- Waktu pemanasan awal: lebih dari 24 jam.
- Rangkaian penggerak sederhana.
Cara Mendeteksi dan Mengukur Gas menggunakan Sensor Kualitas Udara MQ135:
Untuk mengukur atau mendeteksi gas, gunakan pin analog atau pin digital. Cukup terapkan 5V ke modul dan Anda dapat mengamati bahwa LED daya modul menyala (bersinar) dan LED output mati ketika tidak ada gas yang terdeteksi oleh modul. Artinya keluaran pin digital adalah 0V. Perhatikan bahwa sensor harus disimpan untuk waktu pemanasan awal selama 20 detik (seperti yang disebutkan dalam spesifikasi) sebelum pengoperasian sebenarnya.
Nah, ketika sensor MQ135 dioperasikan untuk mendeteksi, maka output LED akan menyala bersamaan dengan pin output digital. Jika tidak, gunakan potensiometer hingga outputnya meningkat. Setiap kali sensor mendeteksi konsentrasi gas tertentu, pin digital menjadi tinggi (5V), jika tidak maka akan tetap rendah (0V).
Kita juga bisa menggunakan pin analog untuk mendapatkan hasil yang sama. Nilai analog keluaran (0-5V) dibaca dari mikrokontroler. Nilai ini berbanding lurus dengan konsentrasi gas yang terdeteksi sensor. Berdasarkan nilai eksperimen, kita dapat mengamati kerja dan reaksi sensor MQ135 dengan konsentrasi gas yang berbeda dan pemrograman yang dikembangkan sesuai dengan itu.
Cara Mengukur PPM (parts per Million) menggunakan Sensor Kualitas Udara MQ135:
Sensor gas MQ-135 menggunakan SnO2, bahan sensitif gas yang memiliki ketahanan lebih tinggi di udara bersih. Peningkatan jumlah gas berbahaya menurunkan resistensi sensor gas MQ135. Untuk mengukur PPM dengan sensor kualitas udara MQ-135, amati grafik antara (Rs/Ro) dan PPM seperti di bawah ini.
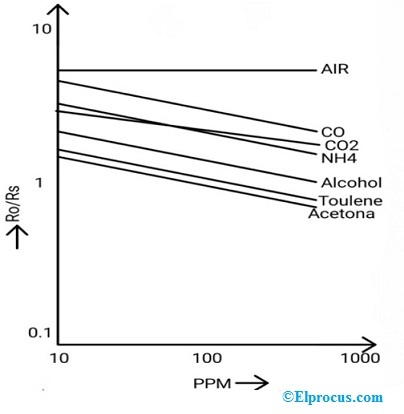
- Karakteristik sensitivitas khas sensor MQ135 ditunjukkan pada grafik di atas.
- Suhu 20°C, kelembaban 65%, konsentrasi O2 21% dan tahanan beban RL 20kilo ohm.
- Disini Ro mengacu pada nilai resistansi sensor pada 100ppm NH3 pada udara bersih atau fresh air.
- Rs mengacu pada ketahanan sensor pada beberapa konsentrasi gas.
- Kita dapat mengkalibrasi sensor MQ135 dengan menentukan nilai Rs dari rumus di bawah ini,
- Resistansi sensor Rs = (Vc/VRL-1)RL
- Setelah menghitung nilai Ro dan Rs, ditemukan rasionya, dan dengan menggunakan grafik di atas kita dapat menghitung nilai PPM dari gas tertentu yang akan diukur.
Cara Antarmuka Sensor Kualitas Udara MQ135 dengan Arduino:
Diagram rangkaian antarmuka sensor kualitas udara MQ135 dengan Arduino ditunjukkan di bawah ini. Komponen yang dibutuhkan adalah,
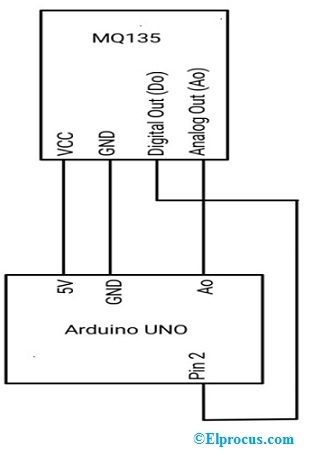
- Sensor kualitas udara MQ135
- Arduino UNO
- Catu daya 5V
- Menghubungkan kabel.
Koneksi dibuat sesuai diagram sirkuit yang ditunjukkan di atas. Pin VCC sensor MQ135 terhubung ke pin 5V Arduino. Ini memperkuat sensor MQ135. Pin keluaran analog Ao dan pin keluaran digital Do dari sensor MQ135 dihubungkan ke Ao dan pin 2 Arduino. Terakhir, pin ground MQ135 dan Arduino dihubungkan ke ground yang sama. Sirkuit antarmuka ini memberikan output digital dan analog dari sensor kualitas udara MQ135.
DHT11 adalah sensor suhu dan kelembaban digital dasar berbiaya rendah.
- DHT11 adalah sensor kelembaban dan suhu digital kabel tunggal, yang memberikan nilai kelembaban dan suhu secara serial dengan protokol satu kabel.
- Sensor DHT11 memberikan nilai kelembapan relatif dalam persentase (20 hingga 90% RH) dan nilai suhu dalam derajat Celcius (0 hingga 50 °C).
- Sensor DHT11 menggunakan komponen pengukuran kelembaban resistif, dan komponen pengukuran suhu NTC.
Pinout DHT11:
- DHT11 adalah sensor 4-pin, pin-pin ini adalah VCC, DATA, GND dan satu pin tidak digunakan seperti ditunjukkan pada gambar di bawah.
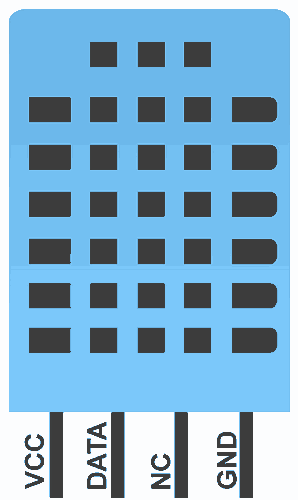
Deskripsi Pin:
| nomor pin. | Nama Pin | Deskripsi Pin |
| 1 | VCC | Catu daya 3,3 hingga 5,5 Volt DC |
| 2 | DATA | Pin keluaran digital |
| 3 | tidak | Tidak digunakan |
| 4 | GND | Tanah |
Spesifikasi sensor DHT11
- Catu daya: 3,3 hingga 5V DC
- Konsumsi saat ini: maks 2,5mA
- Rentang pengoperasian: 20-80% RH, 0-50°C
- Rentang pengukuran kelembaban: 20-90% RH
- Akurasi pengukuran kelembaban: ±5% RH
- Rentang pengukuran suhu: 0-50°C
- Akurasi pengukuran suhu: ±2°C
- Waktu respons: 1 detik
- Tingkat pengambilan sampel: 1Hz (1 sampel per detik)
- Format keluaran data: sinyal digital bus tunggal
- Jarak transmisi data: 20-30m (di udara terbuka)
- Dimensi: 15mm x 12mm x 5.5mm
- Berat: 2.5g
- Protokol transmisi sinyal digital: 1 sinyal mulai + data 40bit + 1 checksum
Komunikasi dengan Mikrokontroler
- DHT11 hanya menggunakan satu kabel untuk komunikasi. Level tegangan dengan nilai waktu tertentu menentukan logika satu atau logika nol pada pin ini.
- Proses komunikasi terbagi dalam tiga tahap, pertama mengirimkan request ke sensor DHT11 kemudian sensor akan mengirimkan pulsa respon dan kemudian mulai mengirimkan data sebanyak 40 bit ke mikrokontroler.
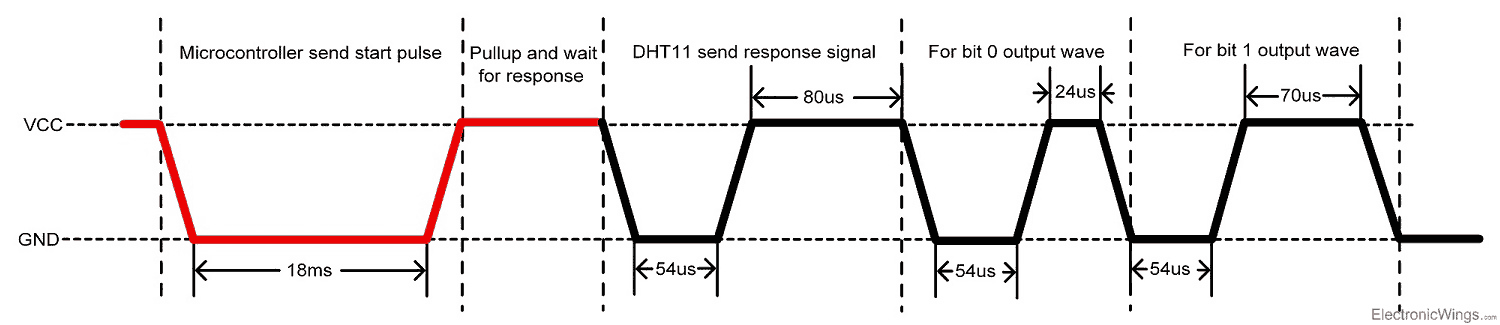
Mulai pulsa (Permintaan)
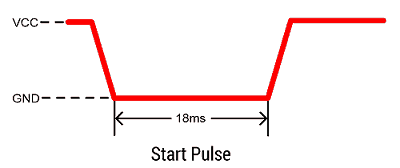
- Untuk memulai komunikasi dengan DHT11, pertama-tama kita harus mengirimkan pulsa awal ke sensor DHT11.
- Untuk memberikan pulsa awal, tarik ke bawah (rendah) pin data minimal 18ms lalu tarik ke atas, seperti yang ditunjukkan pada diagram.
Tanggapan
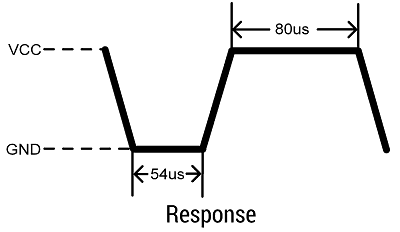
- Setelah mendapatkan pulsa start, sensor DHT11 mengirimkan pulsa respon yang menandakan bahwa DHT11 menerima pulsa start.
- Pulsa respons rendah pada 54us dan kemudian menjadi tinggi pada 80us.
Data
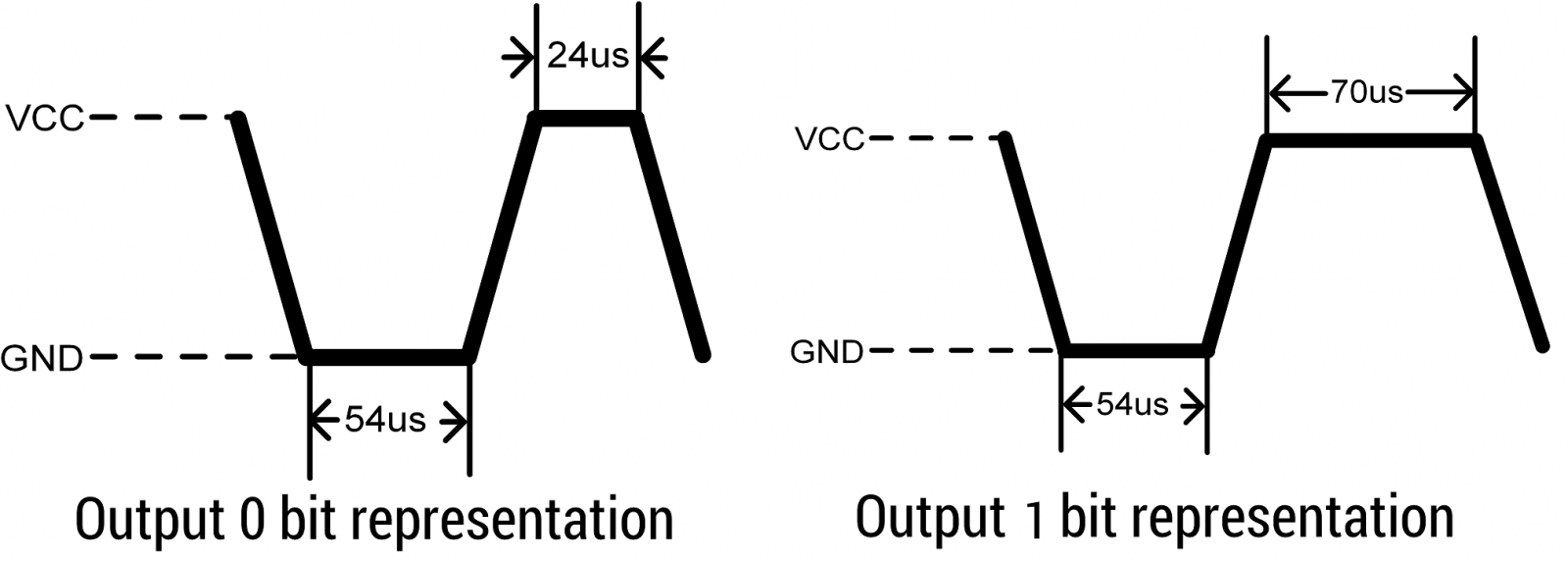
- Setelah mengirimkan pulsa respon, sensor DHT11 mengirimkan data yang berisi nilai kelembaban dan suhu beserta checksum.
- Bingkai data memiliki panjang total 40 bit, berisi 5 segmen (byte) dan setiap segmen memiliki panjang 8-bit.
- Pada 5 segmen ini, dua segmen pertama berisi nilai kelembapan dalam bentuk bilangan bulat desimal. Nilai ini memberi kita Persentase Kelembaban Relatif. 8-bit pertama adalah bagian bilangan bulat dan 8 bit berikutnya adalah bagian pecahan.
- Dua segmen berikutnya berisi nilai suhu dalam bentuk bilangan bulat desimal. Nilai ini memberi kita suhu dalam bentuk Celcius.
- Segmen terakhir adalah checksum yang menampung checksum dari empat segmen pertama.
- Di sini byte checksum adalah penambahan langsung nilai kelembaban dan suhu. Dan kita bisa memverifikasinya apakah sama dengan nilai checksum atau tidak. Jika tidak sama maka ada kesalahan pada data yang diterima.
- Setelah data diterima, pin DHT11 masuk ke mode konsumsi daya rendah hingga pulsa mulai berikutnya.
Akhir bingkai
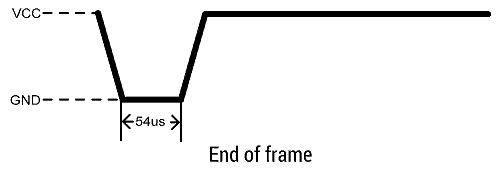
- Setelah mengirimkan data 40-bit, sensor DHT11 mengirimkan 54us level rendah dan kemudian menjadi tinggi. Setelah ini DHT11 masuk ke mode tidur.
Karakteristik dari Sensor LM35:
- Memiliki sensitivitas suhu, dengan faktor skala linier antara tegangan dan suhu 10 mVolt/ºC, sehingga dapat dikalibrasi langsung dalam celcius.
- Memiliki ketepatan atau akurasi kalibrasi yaitu 0,5ºC pada suhu 25 ºC
- Memiliki jangkauan maksimal operasi suhu antara -55 ºC sampai +150 ºC.
- Bekerja pada tegangan 4 sampai 30 volt.
- Memiliki arus rendah yaitu kurang dari 60 µA.
- Memiliki pemanasan sendiri yang rendah (low-heating) yaitu kurang dari 0,1 ºC pada udara diam.
- Memiliki impedansi keluaran yang rendah yaitu 0,1 W untuk beban 1 mA.
- Memiliki ketidaklinieran hanya sekitar ± ¼ ºC.
4. IC L29D


- Pin EN (Enable) : EN1.2, EN3.4. Berfungsi mengaktifkan driver motor. Selain itu pin ini juga berfungsi untuk menerima sinyal PWM sebagai penentu kecepatan motor.
- Pin In (Input) : 1A, 2A, 3A, 4A. Berfungsi untuk menentukan arah perputaran motor DC
- Pin Out (Output) : 1Y, 2Y, 3Y, 4Y. Berfungsi sebagai keluaran driver yang dihubungkan ke motor DC
- Pin VCC1. Berfungsi sebagai sumber tegangan logic pada driver motor. Umumnya 3.3v atau 5v
- Pin VCC2. Berfungsi sebagai sumber tegangan yang akan digunakan untuk memutar motor DC. Umumnya 4.5-36v
- Pin GND (Ground) untuk dihubungkan ke mikrokontroller dan sumber tegangan motor sebagai tegangan referensi.
Menentukan arah putar Motor DC pada IC L293D
Mengendalikan Motor DC
Untuk memiliki kendali penuh atas motor DC kita harus mengontrol kecepatan dan arah putarannya. Hal ini dapat dicapai dengan menggabungkan kedua teknik ini.
- PWM – untuk mengontrol kecepatan
- H-Bridge – untuk mengontrol arah putaran
PWM – untuk mengontrol kecepatan
Kecepatan motor DC dapat dikontrol dengan mengubah tegangan inputnya. Teknik umum untuk melakukan ini adalah dengan menggunakan PWM (Pulse Wide Modulation).
PWM adalah suatu teknik dimana nilai rata-rata tegangan input diatur dengan mengirimkan serangkaian pulsa ON-OFF.
Tegangan rata-rata sebanding dengan lebar pulsa yang dikenal sebagai Duty Cycle .
Gambar di bawah menunjukkan teknik PWM dengan siklus kerja dan tegangan rata-rata yang berbeda.

H-Bridge – untuk mengontrol arah putaran
Arah putaran motor DC dapat dikontrol dengan mengubah polaritas tegangan masukannya. Teknik umum untuk melakukan hal ini adalah dengan menggunakan jembatan-H.Rangkaian H-bridge terdiri dari empat saklar dengan motor di tengahnya membentuk susunan seperti H.
L293D paling sering digunakan untuk menggerakkan motor, tetapi juga dapat digunakan untuk menggerakkan beban induktif apa pun seperti solenoid relai atau transistor daya switching besar.Ia mampu menggerakkan empat solenoid, empat motor DC satu arah, dua motor DC dua arah, atau satu motor stepper.IC L293D memiliki rentang suplai 4,5V hingga 36V dan mampu menghasilkan arus keluaran puncak 1,2A per saluran, sehingga bekerja sangat baik dengan sebagian besar motor kami.
5. Lampu

Lampu LED DC 12 volt 10 watt adalah bohlam lampu led 12 volt dc 10 watt fitting e27 dengan sumber listrik tenaga battery 12 volt atau dengan tegangan listrik 12v DC, bisa dipakai untuk pelengkap solar cell atau lampu dengan sumber listrik tenaga surya / matahari atau bisa juga dikoneksikan dengan aki battery 12volt DC mobil atau motor
Lampu sangat hemat energi, menggunakan tehnologi LED yg terkenal irit komsumsi daya listrik, kuat dan daya tahan lama, dipergunakan untuk penerangan dari sumber aki solar cell, aki mobil, motor, dll atau juga untuk emergency lamp jika listrik rumah padam dengan sumber listrik mengunakan aki battery
Sangat cocok dipakai di daerah pedalaman yang belum mempunyai aliran listrik, karena dapat dihubungkan ke aki battery ataupun tenaga surya, dan juga sering di gunakan sebagai lampu untuk pelengkapan berburu di hutan dengan sumber dari aki mobil / motor, atau juga di gunakan pada kapal ikan
Aplikasi pemakaian :
- Untuk penerangan dari sumber solar cell maupun lampu emergency, lampu taman dll
- Kalau mati lampu langsung bisa sebagai emergency lamp, tanpa perlu listrik hanya perlu sumber dari aki
Spesifikasi :
- Lampu LED DC 12 volt
- Input Voltage : DC 12V
- Color Temperature : White
- Power : 10 Watt
- Base Lamp : E27
- Life Time : 30.000 hours
6. Buzzer

Seperti namanya, Piezoelectric Buzzer adalah jenis Buzzer yang menggunakan efek Piezoelectric untuk menghasilkan suara atau bunyinya. Tegangan listrik yang diberikan ke bahan Piezoelectric akan menyebabkan gerakan mekanis, gerakan tersebut kemudian diubah menjadi suara atau bunyi yang dapat didengar oleh telinga manusia dengan menggunakan diafragma dan resonator.
Berikut ini adalah gambar bentuk dan struktur dasar dari sebuah Piezoelectric Buzzer.
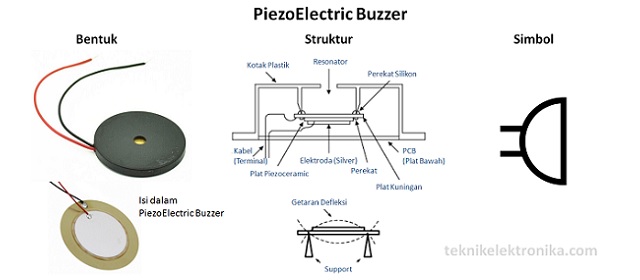
Jika dibandingkan dengan Speaker, Piezo Buzzer relatif lebih mudah untuk digerakan. Sebagai contoh, Piezo Buzzer dapat digerakan hanya dengan menggunakan output langsung dari sebuah IC TTL, hal ini sangat berbeda dengan Speaker yang harus menggunakan penguat khusus untuk menggerakan Speaker agar mendapatkan intensitas suara yang dapat didengar oleh manusia.
Piezo Buzzer dapat bekerja dengan baik dalam menghasilkan frekuensi di kisaran 1 – 5 kHz hingga 100 kHz untuk aplikasi Ultrasound. Tegangan Operasional Piezoelectric Buzzer yang umum biasanya berkisar diantara 3Volt hingga 12 Volt.
7. LCD (Liquid Crystal Display)




Arduino adalah kit elektronik atau papan rangkaian elektronik open source yang di dalamnya terdapat komponen utama yaitu sebuah chip mikrokontroler dengan jenis AVR dari perusahaan Atmel. Arduino yang kita gunakan dalam praktikum ini adalah Arduino Uno yang menggunakan chip AVR ATmega 328P. Dalam memprogram Arduino, kita bisa menggunakan komunikasi serial agar Arduino dapat berhubungan dengan komputer ataupun perangkat lain.
Adapun spesifikasi dari Arduino Uno ini adalah sebagai berikut :

Bagian-bagian arduino uno:
-Power USB
Digunakan untuk menghubungkan Papan Arduino dengan komputer lewat koneksi USB.
-Power jack
Supply atau sumber listrik untuk Arduino dengan tipe Jack. Input DC 5 - 12 V.
-Crystal Oscillator
Kristal ini digunakan sebagai layaknya detak jantung pada Arduino. Jumlah cetak menunjukkan 16000 atau 16000 kHz, atau 16 MHz.
-Reset
Digunakan untuk mengulang program Arduino dari awal atau Reset.
-Digital Pins I / O
Papan Arduino UNO memiliki 14 Digital Pin. Berfungsi untuk memberikan nilai logika ( 0 atau 1 ). Pin berlabel " ~ " adalah pin-pin PWM ( Pulse Width Modulation ) yang dapat digunakan untuk menghasilkan PWM.
-Analog Pins
Papan Arduino UNO memiliki 6 pin analog A0 sampai A5. Digunakan untuk membaca sinyal atau sensor analog seperti sensor jarak, suhu dsb, dan mengubahnya menjadi nilai digital.
-LED Power Indicator
Lampu ini akan menyala dan menandakan Papan Arduino mendapatkan supply listrik dengan baik.
Bagian - bagian pendukung:
-RAM
RAM (Random Access Memory) adalah tempat penyimpanan sementara pada komputer yang isinya dapat diakses dalam waktu yang tetap, tidak memperdulikan letak data tersebut dalam memori atau acak. Secara umum ada 2 jenis RAM yaitu SRAM (Static Random Acces Memory) dan DRAM (Dynamic Random Acces Memory).
-ROM
ROM (Read-only Memory) adalah perangkat keras pada computer yang dapat menyimpan data secara permanen tanpa harus memperhatikan adanya sumber listrik. ROM terdiri dari Mask ROM, PROM, EPROM, EEPROM.
Block Diagram Mikrokontroler ATMega 328P pada Arduino UNO
Adapun block diagram mikrokontroler ATMega 328P dapat dilihat pada gambar berikut:



 |
| Rangkain Reset |

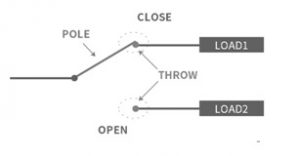
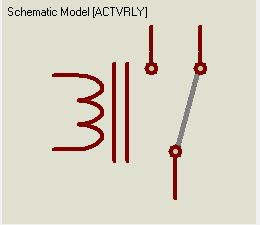
Saklar yang mempunyai satu masukan dan dua keluaran berbeda disebut SPDT. Istilah SPDT adalah singkatan dari Single Pole Double Throw Switch yang digunakan untuk mengontrol dua rangkaian berbeda melalui input tunggal yang serupa. Pengoperasian saklar ini dapat dilakukan secara manual atau disertakan melalui kumparan elektromagnetik.
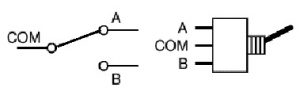
Struktur dasar saklar ini ditunjukkan di bawah ini. Struktur ini meliputi tiang, lempar, buka dan tutup.


Terdapat dua bagian utama pada sebuah Motor Listrik DC, yaitu Stator dan Rotor. Stator adalah bagian motor yang tidak berputar, bagian yang statis ini terdiri dari rangka dan kumparan medan. Sedangkan Rotor adalah bagian yang berputar, bagian Rotor ini terdiri dari kumparan Jangkar. Dua bagian utama ini dapat dibagi lagi menjadi beberapa komponen penting yaitu diantaranya adalah Yoke (kerangka magnet), Poles (kutub motor), Field winding (kumparan medan magnet), ArmatureWinding (Kumparan Jangkar), Commutator (Komutator)dan Brushes (kuas/sikat arang).
Pada prinsipnya motor listrik DC menggunakan fenomena elektromagnet untuk bergerak, ketika arus listrik diberikan ke kumparan, permukaan kumparan yang bersifat utara akan bergerak menghadap ke magnet yang berkutub selatan dan kumparan yang bersifat selatan akan bergerak menghadap ke utara magnet. Saat ini, karena kutub utara kumparan bertemu dengan kutub selatan magnet ataupun kutub selatan kumparan bertemu dengan kutub utara magnet maka akan terjadi saling tarik menarik yang menyebabkan pergerakan kumparan berhenti
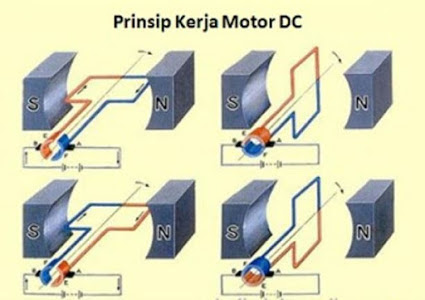
Untuk menggerakannya lagi, tepat pada saat kutub kumparan berhadapan dengan kutub magnet, arah arus pada kumparan dibalik. Dengan demikian, kutub utara kumparan akan berubah menjadi kutub selatan dan kutub selatannya akan berubah menjadi kutub utara. Pada saat perubahan kutub tersebut terjadi, kutub selatan kumparan akan berhadap dengan kutub selatan magnet dan kutub utara kumparan akan berhadapan dengan kutub utara magnet. Karena kutubnya sama, maka akan terjadi tolak menolak sehingga kumparan bergerak memutar hingga utara kumparan berhadapan dengan selatan magnet dan selatan kumparan berhadapan dengan utara magnet. Pada saat ini, arus yang mengalir ke kumparan dibalik lagi dan kumparan akan berputar lagi karena adanya perubahan kutub. Siklus ini akan berulang-ulang hingga arus listrik pada kumparan diputuskan.
11. Ground

12. Resistor

Resistor merupakan komponen pasif yang memiliki nilai resistansi tertentu dan berfungsi untuk menghambat jumlah arus listrik yang mengalir dalam suatu rangkaian. Resistor dapat diklasifikasikan menjadi beberapa jenis, diantaranya resistor nilai tetap (fixed resistor), resistor variabel (variabel resistor), thermistor, dan LDR.




Cara membaca nilai resistor
Cara menghitung nilai resistansi resistor dengan gelang warna :
1. Masukan angka langsung dari kode warna gelang pertama.
2. Masukan angka langsung dari kode warna gelang kedua.
3. Masukan angka langsung dari kode warna gelang ketiga.
4. Masukkan jumlah nol dari kode warna gelang ke-4 atau pangkatkan angka tersebut dengan 10 (10^n).
5. Gelang terakhir merupakan nilai toleransi dari resistor

Seri : Rtotal = R1 + R2 + R3 + ….. + Rn
Paralel: 1/Rtotal = 1/R1 + 1/R2 + 1/R3 + ….. + 1/Rn
13. Diode
Cara Kerja Dioda:
Secara sederhana, cara kerja dioda dapat dijelaskan dalam tiga kondisi, yaitu kondisi tanpa tegangan (unbiased), diberikan tegangan positif (forward biased), dan tegangan negatif (reverse biased).
a. tanpa tegangan
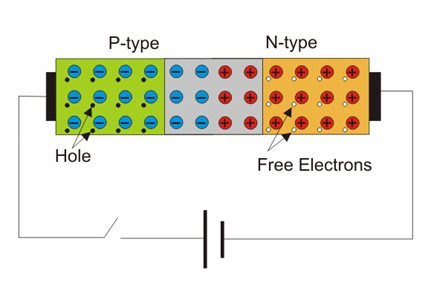
Pada kondisi tidak diberikan tegangan akan terbentuk suatu perbatasan medan listrik pada daerah P-N junction. Hal ini terjadi diawali dengan proses difusi, yaitu bergeraknya muatan elektro dari sisi n ke sisi p.
b. kondisi forward bias
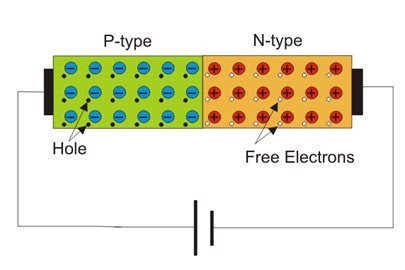
Pada kondisi ini, bagian anoda disambungkan dengan terminal positif sumber listrik dan bagian katoda disambungkan dengan terminal negatif. Adanya tegangan eksternal akan mengakibatkan ion-ion yang menjadi penghalang aliran listrik menjadi tertarik ke masing-masing kutub. Ion-ion negatif akan tertarik ke sisi anoda yang positif, dan ion-ion positif akan tertarik ke sisi katoda yang negatif.
c. kondisi reverse bias
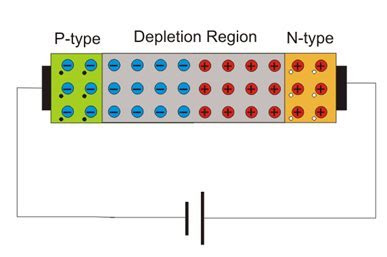
Pada kondisi ini, bagian anoda disambungkan dengan terminal negatif sumber listrik dan bagian katoda disambungkan dengan terminal positif. Adanya tegangan eksternal akan mengakibatkan ion-ion yang menjadi penghalang aliran listrik menjadi tertarik ke masing-masing kutub.
3. Rumus

14. Relay
Relay adalah Saklar (Switch) yang dioperasikan secara listrik dan merupakan komponen Electromechanical (Elektromekanikal) yang terdiri dari 2 bagian utama yakni Elektromagnet (Coil) dan Mekanikal (seperangkat Kontak Saklar/Switch). Relay menggunakan Prinsip Elektromagnetik untuk menggerakkan Kontak Saklar sehingga dengan arus listrik yang kecil (low power) dapat menghantarkan listrik yang bertegangan lebih tinggi. Sebagai contoh, dengan Relay yang menggunakan Elektromagnet 5V dan 50 mA mampu menggerakan Armature Relay (yang berfungsi sebagai saklarnya) untuk menghantarkan listrik 220V 2A.

Ada besi atau yang disebut dengan nama inti besi dililit oleh sebuah kumparan yang berfungsi sebagai pengendali. Sehingga kumparan kumparan yang diberikan arus listrik maka akan menghasilkan gaya elektromagnet. Gaya tersebut selanjutnya akan menarik angker untuk pindah dari biasanya tutup ke buka normal. Dengan demikian saklar menjadi pada posisi baru yang biasanya terbuka yang dapat menghantarkan arus listrik. Ketika armature sudah tidak dialiri arus listrik lagi maka ia akan kembali pada posisi awal, yaitu normal close.
Fitur:
1. Tegangan pemicu (tegangan kumparan) 5V
2. Arus pemicu 70mA
3. Beban maksimum AC 10A @ 250 / 125V
4. Maksimum baban DC 10A @ 30 / 28V
5. Switching maksimum
15. Baterai

- Download library yang diperlukan pada bagian download dalam blog.
- Buka proteus yang sudah diinstal untuk membuat rangkaian.
- Tambahkan komponen seperti Arduino, sensor, dan perangkat lainnya lalu susun menjadi rangkaian.
- Buka Arduino IDE yang sudah diinstal.
- Di Arduino IDE, pergi ke menu "File" > "Preferences".Pastikan opsi
- "Show verbose during compile" dicentang untuk mendapatkan informasi detail saat kompilasi.
- Salin kode program Arduino pada blog kemudian tempelkan program tadi ke Arduino IDE.
- Kompilasikan kode dengan menekan tombol "Verify" di Arduino IDE.
- Cari dan salin path file HEX yang dihasilkan selama proses kompilasi.
- Kembali ke Proteus dan pilih Arduino yang telah Anda tambahkan di rangkaian.
- Buka opsi "Program File" dan tempelkan path HEX yang telah Anda salin dari Arduino IDE.
- Jalankan simulasi di Proteus.





- Visual designer




- Listing Program




.jpg)

Tidak ada komentar:
Posting Komentar